★DKM伺服马达(Servo Motor)驱动器:搭载23-bit 绝对型编码器AC伺服马达,拥有高解析与高定位精度这样。
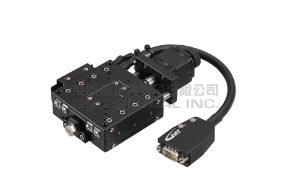
★DKL线性马达(Linear Motor)驱动器:搭载线性马达与搭配外部光学尺(ABZ),达到闭回路控制的需求。
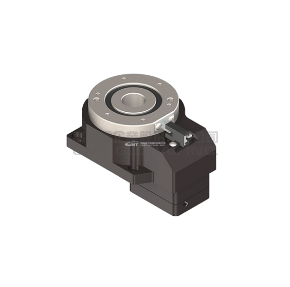
★DKD直驱马达(DD Motor)驱动器:搭载19-bit 多圈绝对型编码器的直驱电机,能够控制多圈运行与位置控制。
Update:2022.11.3
型号
K-SERVO
规
格
说
明
电源
主回路
24 ~ 48 VDC ± 15%,最大耐压60V
额定电流
6 Arms
最大电流
I / O电源电压
24 VDC ± 15%
环境
温度
操作:0 ~ 55°C
储存:- 20 ~ 80°C,无结霜
湿度
高度
震动
5.88 m / S2 以下,10 ~ 60 Hz,不可在共振频率上连续使用
控制方法
MOSFET PWM 弦波驱动
编码器回授
RS485 半双工,支持多摩川编码器 2.5 Mbps,可选配绝对式系统
光学尺回授
控制信号
输入
13个输入,与脉冲输入共享2点
输出
13个输出
特殊输出
制动 (煞车)解除输出,独立接头 CN7
模拟信号
N / A
脉冲信号
2点输入,高速光耦合输入,LINE drive IC AM26C32
马达Z相开极集输出
通信功能
USB / RS485
1:1 对调整端个人计算机使用mini USB接口
1:16 通信对上层使用RS485接口
* RS485为半双工 Modbus RTU 9600,19200,38400,57600,115200 五种通讯速度
回生处理
N / A,重负荷 / 垂直轴应用时,有回生处理单元可供选配
动态煞车
控制模式
(1) 位置控制 (Pulse)
(2) PIO 过程控制,可透过RS485跑虚拟PIO动作
状态指示
保护功能
过电流、过电压、过负荷、位置偏差过大、过速度、编码器错误、EEPROM错误
安规认证
操
作
功
能
位置
脉冲输入
线驱动器 : 500kpps/4Mpps, 开极集 : 200kpps
DIO
7 bit 位置输入, 128点内部位置
内部程序
128可程序步序
回原点模式
4种 (极限寻边、极限后寻Z相、碰停、碰停后寻Z相)
特殊机能
Error MAP补偿128点,可由DI启用,以启用点为MAP之0点
辅助功能




























-01_3.jpeg "GMT TW")



